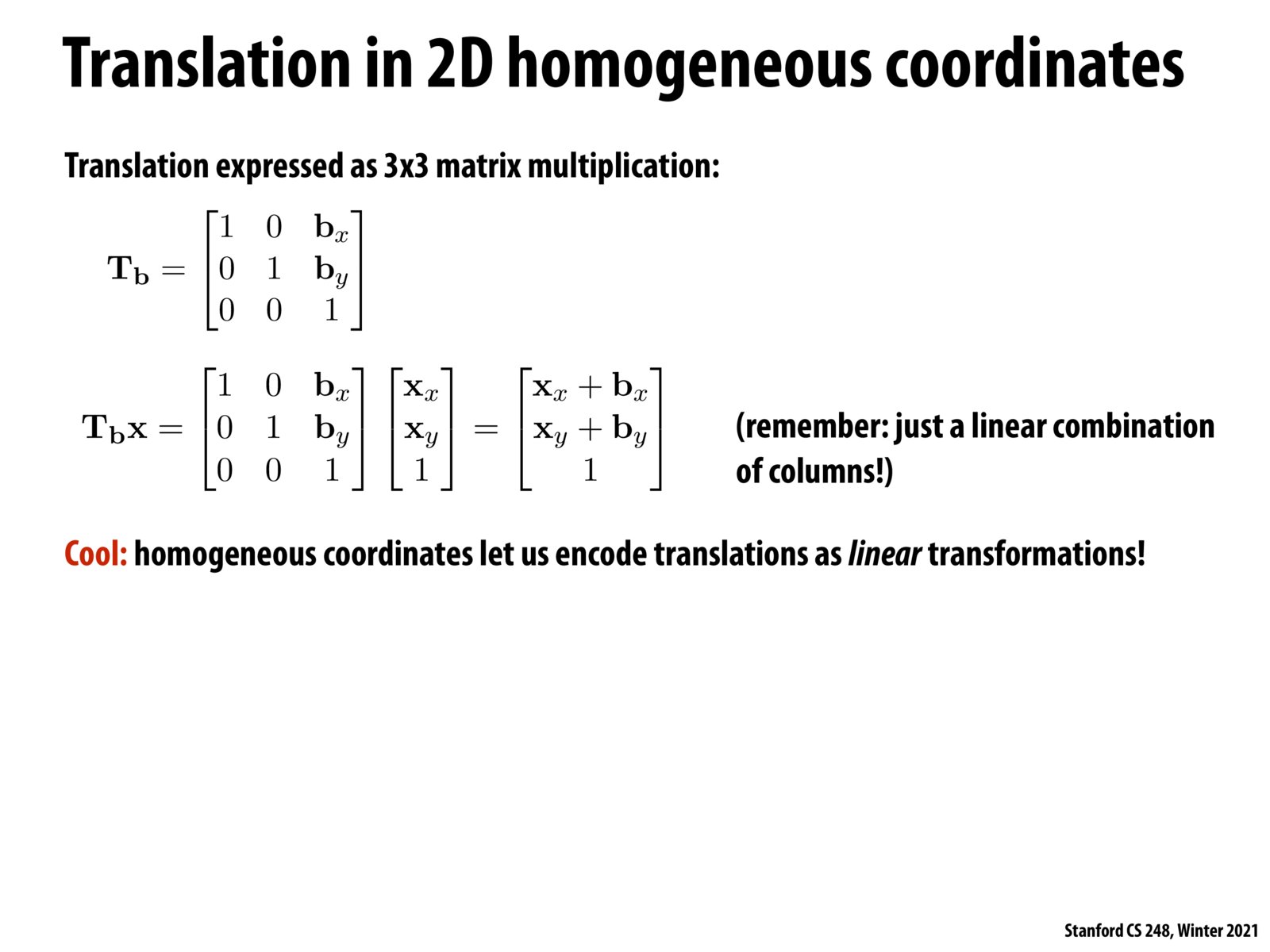

So far, the warps we have looked at affine transformations, and for affine transformations this bottom element will always be unchanged. There are others use cases, such as perspective projection, where this bottom element may not be equal to 1. The perspective projection operation detailed in the link uses the third coordinate to perform the same operation as the divide by z calculation which we discussed for pinhole cameras.

I'm not sure what applications we will find in this course in which this happens, but I was reading about homogeneous coordinates after this class and it seems that one of their most useful applications is representing points at infinity, in which case w=0. For example, (1, 2, 0) is a point at infinity because "dividing" by zero would make the inputs infinite.

I was reading about degrees of freedom for transformations (e.g., a 2D rotation has 1 DOF, a 3D translation has 3 DOF, and 2D affine transformation has 6 DOF) -- how does this concept tie in to what we're learning in class, and what are its applications in graphics?
Please log in to leave a comment.
It seems that all 2D elements are converted to homogeneous coordinates by appending 1 and all the 3D transformation matrices presented thus far have [0 0 1] in their bottom row, so in that case, how do we ever end up with w not being equal to 1?